實驗一
實 驗 名 稱: 可拚裝智能模型實驗
實 驗 簡 介:“慧魚教具及創意組合模型”,又稱為“工程積木”,“智慧魔方”。它集教具和仿真模型於一身,是科技知識啟蒙、創造性思維訓練及創造力開發的最佳載體。“慧魚教具及創意組合模型”是由德國發明家、企業家、當今世界擁有專利最多(5000項)的Artur Fischer博士於1964年發明問世的。菲舍爾博士因此還榮獲了德國諾貝爾工程獎。“慧魚”的技術含量極高。目前,國際最前沿的工程技術,如仿生技術、氣動技術、傳感技術、計算機技術以及機器人技術等,在“慧魚”中都實現了微型仿真替代。“慧魚”有各種型號和規格的零件近千種,一般工程機械製造所需要的零部件如連杆、齒輪、馬達、渦輪,以及汽缸、壓縮機、發動機、離合器,甚至熱(光、觸、磁)敏傳感器、信號轉換開關、計算機接口等等,在“慧魚”中都可以找到。因此,“慧魚教具及創意組合模型”零部件的仿真度,幾乎能夠實現任何複雜技術過程和大型設計的模型,使之真實地“再現”。該實驗設備能夠組裝各種機械及設備,將其用於輔助理論教學,將使學生獲得很強的感性認識,並且能發揮其無限的創造力。
適 用 課 程: 機械原理
實 驗 目 的:A通過對動手組建模型,連線,編程,運行程序控製模型等各階段學習後,對慧魚創意組合模型的運作方法有一個初步的熟悉;B了解基本的機械結構和特點掌握電氣動控製工業技術的基本概念、分類及特點;C了解電氣動元件的工作原理、種類和實際應用方式,電氣動控製係統的組成和結構掌握基本的電氣動控製技術的應用,了解現代自動化控製係統的結構和特點;D在機構創新實驗的基礎上利用實驗模型零件拚裝創新機構實物模型。
麵 向 專 業: 機械類
實驗項目性質: 設計性(課內選做/課外開放)
計 劃 學 時: 8學時
實 驗 分 組: 4人/組
麵 向 專 業: 機械類
實 驗 要 求:A預習《機械原理實驗指導書》中實驗目的、原理、設備、操作步驟或說明,並寫出預習報告,提出設計方案;實驗前沒有預習報告者不能夠進行實驗;B 進行實驗時衣著整齊,遵守實驗室管理規定、學生實驗守則、儀器設備操作規定等相關規定,服從實驗技術人員或實驗教師的指導與管理。
開 放 地 點: 教一樓——218室(機械係統創新實驗室)
開 放 辦 法: 先登陸網站進行網上預約或到實驗室填寫預約表進行預約,根據預約時間提前預習寫出預習報告、進行實驗。
開 放 時 間: 以網上公告或實驗室時間安排為準
實 驗 分 組: 4人/組
實 驗 照 片:


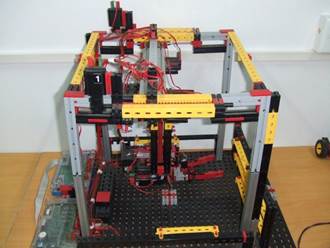

實驗一 可拚裝智能模型實驗
“慧魚教具及創意組合模型”,又稱為“工程積木”,“智慧魔方”。它集教具和仿真模型於一身,是科技知識啟蒙、創造性思維訓練及創造力開發的最佳載體。“慧魚教具及創意組合模型”是由德國發明家、企業家、當今世界擁有專利最多(5000項)的Artur Fischer博士於1964年發明問世的。菲舍爾博士因此還榮獲了德國諾貝爾工程獎。“慧魚”的技術含量極高。目前,國際最前沿的工程技術,如仿生技術、氣動技術、傳感技術、計算機技術以及機器人技術等,在“慧魚”中都實現了微型仿真替代。“慧魚”有各種型號和規格的零件近千種,一般工程機械製造所需要的零部件如連杆、齒輪、馬達、渦輪,以及汽缸、壓縮機、發動機、離合器,甚至熱(光、觸、磁)敏傳感器、信號轉換開關、計算機接口等等,在“慧魚”中都可以找到。因此,“慧魚教具及創意組合模型”零部件的仿真度,幾乎能夠實現任何複雜技術過程和大型設計的模型,使之真實地“再現”。該實驗設備能夠組裝各種機械及設備,將其用於輔助理論教學,將使學生獲得很強的感性認識,並且能發揮其無限的創造力。
一、 實驗目的
1. 通過對動手組建模型,連線,編程,運行程序控製模型等各階段學習後,對慧魚創意組合模型的運作方法有一個初步的熟悉;
2. 了解基本的機械結構和特點掌握電氣動控製工業技術的基本概念、分類及特點;
3. 了解電氣動元件的工作原理、種類和實際應用方式,電氣動控製係統的組成和結構掌握基本的電氣動控製技術的應用,了解現代自動化控製係統的結構和特點;
4. 在機構創新實驗的基礎上利用實驗模型零件拚裝創新機構實物模型。
二、 實驗設備和工具
1. 機械構件
機械構件主要包括:齒輪、聯杆、鏈條、履帶、齒輪(普通齒輪、錐齒輪、斜齒輪、內齧合齒輪、外齧合齒輪)、齒軸、齒條、渦輪、渦扡、凸輪、彈簧、曲軸、萬向節、差速器、輪齒箱、鉸鏈等。
2. 電氣構件
電氣構件主要包括:直流電機(9V雙向),紅外線發射接收裝置、傳感器(光敏、熱敏、磁敏、觸敏),發光器件,電磁氣閥,接口電路板,可調直流變壓器(9V,1A,帶短路保護功能)。接口電路板含電腦接口板、PLC接口板。新型的運用可控製所有馬達電動模型的紅外線遙控裝置由一個強大的紅外線發射器和一個微處理器控製的接收器組成。有效控製範圍為10米,分別可控製3個馬達。
3. 氣動構件
氣動構件主要包括:儲氣罐、氣缸、活塞、氣彎頭、手動氣閥、電磁氣閥、氣管等。
4. 計算機及相關編程軟件
三、 實驗原理與方法
1. 基本構件裝配方法(見圖1-1)
2. 模型接線方法
(1)確定導線的長度
導線長度的確定請參考每個組合包中的操作手冊裏推薦的導線長度,也可以根據自己模型的實際位置以及走線的合理布置選擇合適的長度。
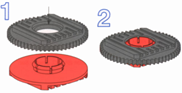
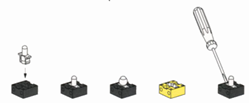

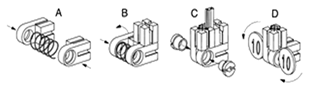

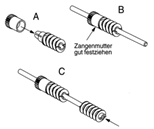
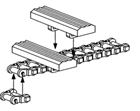
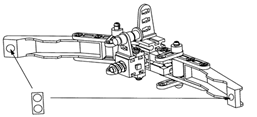
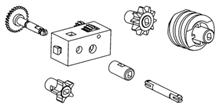

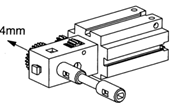
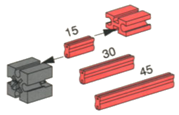



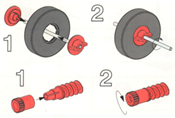
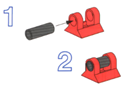






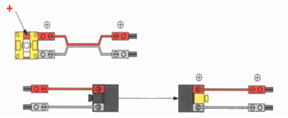
圖1-1 基本構件裝配方法
(2)接線頭的連接方法,如圖1-2:
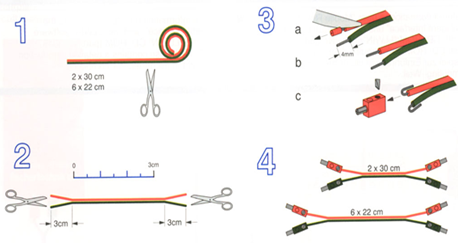
圖1-2 模型導線接線製作
① 先確定導線的長度,數量;
② 導線兩頭分叉3cm左右;
③ 兩頭分別剝去塑料護套,露出約4mm左右的銅線,把銅線向後彎折,插入線頭旋緊螺絲;
④ 重複以上步驟,完成接線頭。
|
|
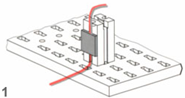
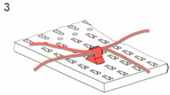
1 導線沿著構件的凹槽走 |
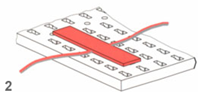
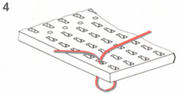
2 導線在基板上走 |
|
|
3 導線穿過線卡 |
4 導線可以在基板下穿過 |
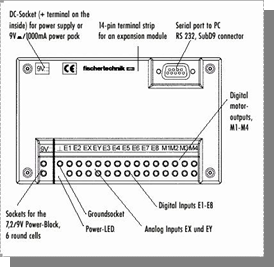
圖1-3 規範走線的方法 圖1-4 智能接口板
4. 模型控製器
慧魚智能接口板(如圖1-4 所示)自帶微處理器,通過串口與計算機相連,在計算機上編好的程序可以下載到接口板的微處理器上,它可以不用計算機獨立地處理程序。它有以下幾個特點:自帶微處理器、程序可在線和下載操作、用LLWin或高級語言編程、通過RS232串口與電腦連接、四路馬達輸出、八路數字信號輸入、二路模擬信號輸入、斷電程序不丟失、輸入輸出可擴展。
5. 編程軟件
用電腦控製模型時,采用LLWin軟件或高級語言如C、C++、VB等編程。LLWin軟件是一種圖形化編程軟件,簡單易用,實時控製。包含17種功能模塊,可任意組合編程,圖形化顯示,全自動連線。
有關使用LLWin編程的詳細說明請參閱LLWin軟件手冊。
6. PLC控製方式
PLC控製方式 中模型裝配好以後,請注意輸入輸出點數,一個馬達有正反兩種轉向,需要使用PLC兩個輸出點。還要注意電機電壓,電機電壓有兩種,一種是直流9伏,另一種是直流24伏。如果PLC是繼電器型輸出,請外接相應的直流電源,如果是其他輸出方式,對於直流9伏的馬達要考慮增加PLC轉接板。
7. 單片機控製方式
單片機控製方式 中,我們可以利用學校現有的單片機設備,自己設計製作控製電路對模型進行控製。
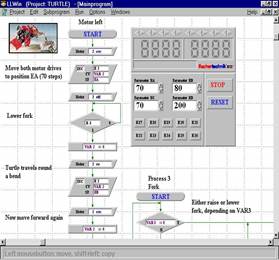
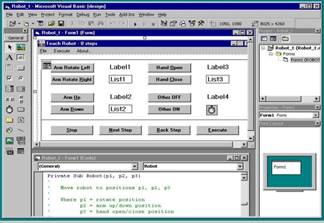
圖1-5 LLWin編程界麵 圖1-6 VB編程界麵
四、 實驗步驟
1. 先選出第一步驟所要的構件,按照圖示或設計要求裝配完成第一步;
2. 再選出第二步驟所要的構件,此時已完成裝配部分為黑白色,按照圖示裝配完成第二步;
3. 用同樣的方法依次類推直到完成最後一步;
4. 機械構件裝配時要確保構件到位,不滑動;
5. 電子構件裝配時要注意電子元件的正負極性,接線穩定可靠,沒有鬆動;
6. 氣動構件裝配時要注意氣管各連接處密封可靠,不要有漏氣現象;
7. 整個模型完成後還要考慮模型的美觀,整理布線要規範。
五、 注意事項
1. 根據每個組合包操作手冊中所列零件清單,分別存放零件;
2. 做實驗時按需領取零件,做完實驗把所有零件分門別類規放原處,尤其是要避免小零件的丟失和損壞;
3. 裝配機械模型過程中,注意零件的尖角,避免劃傷;
4. 模型編程調試前必須進行接口測試,經過手動調試後方可進行。
實驗一 可拚裝智能模型實驗 實驗報告
班級:_________ 姓名:__ ________學號:______ ____ 日期:____ _____
一、實驗目的
二、實驗要求
三、設計題目
四、方案擬定
五、實驗結果
1. 模型方案示意圖
2. 搭接模型
3. 設計方案評述(就其是否滿足設計要求作必要的說明)
4. 模型控製,編程流程圖
5. 設計方案改進建議
六、感想與體會






